2024先进动力系统智能控制国际集训营第三讲——整车电子电气架构发展趋势与跨域控制技术
2024年8月1日,由中国内燃机学会主办,中国内燃机学会内燃动力智能技术分会、天津大学先进内燃动力全国重点实验室共同承办的2024先进动力系统智能控制国际集训营第三讲顺利结束。第三讲由联合汽车电子(UAES)跨域控制业务首席架构师程玉佼老师,做主题为整车电子电气架构发展趋势与跨域控制技术的授课。课程由内燃动力智能技术分会秘书长、天津大学宋康副教授主持。

程玉佼老师在授课中首先概述了电子电器架构的发展趋势,并重点介绍了联合汽车电子在预见性节能控制技术方面的三个核心功能:预测性绿出行功能、预测性续航里程计算,以及预测性滑行回收功能。这些功能均基于高算力芯片,旨在提升新能源汽车的能源效率和驾驶体验。

预测性绿波出行功能:该功能利用高精度地图和定位系统提前获知前方路况和交通信息,以节能与驾驶时间综合最优为目标,规划前方车速曲线。该功能通过简化混动能量模型和利用基于模型预测控制(MPC)的自适应巡航控制(ACC)实现车速跟随,减少了路口停车等待时间,提升了驾驶效率。
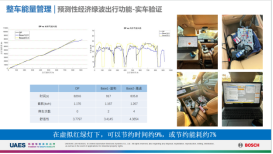
程老师通过仿真实验和实车测试,展示了预测性绿波出行功能在不同工况下的表现。结果显示,在仿真测试条件下,具备该功能的车辆相较于普通驾驶风格,在相同时间内能节约能耗约3.6%,而在相同能耗下,预计能节约时间约5%。实车测试进一步证实了该功能的有效性,在虚拟红绿灯下,具备预测性绿波出行功能的车辆可以节约时间约9%,或节约能耗约7%。

预测性续航里程计算:是基于网联信息和车辆行驶数据,通过精确的电池状态估计算法,预测未来车辆工况信息和电池功率需求,从而实现精准的续航里程预测,解决了驾驶员的里程焦虑问题。该功能利用神经网络预测模型,结合未来一段道路上的车速等实时导航信息,对未来该导航路径下车辆消耗的驱动功率进行准确预测。通过在上海采集的10组实车数据(共计约1000公里),以9组为训练集,1组为测试集进行交叉验证,结果显示驱动功率的平均预测误差约为5.66%。


预测性滑行回收功能:是程老师重点介绍的内容之一。该功能通过车辆的传感器和导航系统,能够提前识别前方的限速情况,例如电子眼或弯道等需要减速的场景。系统通过智能传感器获取这些信息,并提前提醒驾驶员松开油门踏板,进入滑行状态。这一过程有助于实现不超速的同时,使整个滑行过程的能耗达到最低,并确保舒适性。
程老师通过仿真实验和实车测试,展示了预测性滑行回收功能在不同工况下的表现。结果显示,在仿真和实车测试中,启用该功能的车辆在能耗、行驶时间和续航里程方面均表现出明显的优势。


此外,程老师还介绍了联合汽车电子正在打造的UES SofA Platform(USP),即联合汽车电子软件平台。该平台旨在为第三方开发者提供开发环境、核心服务和应用程序,以构建一个开放的生态系统,促进软件定义汽车的发展。
在互动环节中,程老师解答了学员们关于神经网络在驱动功率预测中的应用、电池热管理和预测性控制技术集成等问题。
2024先进动力系统智能控制国际集训营汇集了来自学术界和产业界的专家,共同探讨了汽车电子电气架构的未来发展趋势以及如何利用新技术推动行业进步。本次集训营的成功举办,为参会者提供了宝贵的交流机会,加深了对前沿技术的理解。